Smart Trash
- Untuk menyelesaikan tugas besar mikrokontroler yang diberikan oleh Bapak Dr. Darwison, M.T.
- Mengetahui komponen yang digunakan dalam membuat rangkaian pada tugas besar
- Mengetahui prinsip kerja dari rangkaian

Output voltage: 5V
Output Current: MAX 3A
Output power:15W
conversion efficiency: 96%



.png)


Spesifikasi:
- Input Voltage: DC 4.5-20V
- Static current: 50uA
- Output signal: 0,3V (Output high when motion detected)
- Sentry Angle: 110 degree
- Sentry Distance: max 6/7 m
- Shunt for setting overide trigger: H - Yes, L - No

- Jangkauan spektrum : 760 - 1100 (nm)
- Sudut yang terdeteksi : 0° - 60°
- Catu Daya : 3,3V - 5,3V
- Temperatur Kerja : -25°C sampai 85°C
- Dimensi : 27,3 x 15,4 (mm


Tegangan coil: DC 5V
Struktur: Sealed type
Sensitivitas coil: 0.36W
Tahanan coil: 60-70 ohm
Kapasitas contact: 10A/250VAC, 10A/125VAC, 10A/30VDC, 10A/28VDC
Ukuran: 196154155 mm
Jumlah pin: 5



h. Kabel
 General Reference Standards
General Reference Standards - DIN VDE 0295, IEC 60228, BS 6360
- DIN EN 50290‐2‐22, DIN VDE 0207‐363‐4‐1
- IEC 60227‐5, EN 50525‐2‐51, VDE 0281‐13
- DIN VDE 0482‐332‐1‐2, DIN EN 60332‐1‐2, IEC 60332‐1‐2
- RoHS, REACH & CE Directives
i. OPAMP

Spesifikasi :- Penguatan Tegangan Open-loop atau Av = ∞ (tak terhingga)
- Tegangan Offset Keluaran (Output Offset Voltage) atau Voo = 0 (nol)
- Impedansi Masukan (Input Impedance) atau Zin= ∞ (tak terhingga)
- Impedansi Output (Output Impedance ) atau Zout = 0 (nol)
- Lebar Pita (Bandwidth) atau BW = ∞ (tak terhingga)
- Karakteristik tidak berubah dengan suhu
j. Buzzer



- DIN VDE 0295, IEC 60228, BS 6360
- DIN EN 50290‐2‐22, DIN VDE 0207‐363‐4‐1
- IEC 60227‐5, EN 50525‐2‐51, VDE 0281‐13
- DIN VDE 0482‐332‐1‐2, DIN EN 60332‐1‐2, IEC 60332‐1‐2
- RoHS, REACH & CE Directives

- Penguatan Tegangan Open-loop atau Av = ∞ (tak terhingga)
- Tegangan Offset Keluaran (Output Offset Voltage) atau Voo = 0 (nol)
- Impedansi Masukan (Input Impedance) atau Zin= ∞ (tak terhingga)
- Impedansi Output (Output Impedance ) atau Zout = 0 (nol)
- Lebar Pita (Bandwidth) atau BW = ∞ (tak terhingga)
- Karakteristik tidak berubah dengan suhu
Buzzer Features and Specifications
- Rated Voltage: 6V DC
- Operating Voltage: 4-8V DC
- Rated current: <30mA
- Sound Type: Continuous Beep
- Resonant Frequency: ~2300 Hz
- Small and neat sealed package
- Breadboard and Perf board friendly
- Rated Voltage: 6V DC
- Operating Voltage: 4-8V DC
- Rated current: <30mA
- Sound Type: Continuous Beep
- Resonant Frequency: ~2300 Hz
- Small and neat sealed package
- Breadboard and Perf board friendly
1. Battery



2. Seng (Zn) sebagai katode (kutub negatif baterai)
3. Amonium dioksida (NH4CI) sebagai larutan elektrolit (penghantar)
Terdapat dua jenis baterai yaitu :
2. Sensor Infrared




.JPG)
3. Sensor PIR

Sensor PIR atau disebut juga dengan Passive Infra Red merupakan sensor yang digunakan untuk mendeteksi adanya pancaran sinar infra merah dari suatu object. Sesuai dengan namanya sensor PIR bersifat pasif, yang berarti sensor ini tidak memancarkan sinar infra merah melainkan hanya dapat menerima radiasi sinar infra merah dari luar. Sensor PIR terdiri dari beberapa bagian yaitu :
- Fresnel Lens -->Lensa Fresnel pertama kali digunakan pada tahun 1980an. Digunakan sebagai lensa yang memfokuskan sinar pada lampu mercusuar. Penggunaan paling luas pada lensa Fresnel adalah pada lampu depan mobil, di mana mereka membiarkan berkas parallel secara kasar dari pemantul parabola dibentuk untuk memenuhi persyaratan pola sorotan utama.
- IR Filter -->IR Filter dimodul sensor PIR ini mampu menyaring panjang gelombang sinar infrared pasif antara 8 sampai 14 mikrometer, sehingga panjang gelombang yang dihasilkan dari tubuh manusia yang berkisar antara 9 sampai 10 mikrometer ini saja yang dapat dideteksi oleh sensor. Sehingga Sensor PIR hanya bereaksi pada tubuh manusia saja.
- Pyroelectric Sensor -->Seperti tubuh manusia yang memiliki suhu tubuh kira-kira 32 derajat celcius, yang merupakan suhu panas yang khas yang terdapat pada lingkungan. Pancaran sinar inframerah inilah yang kemudian ditangkap oleh Pyroelectric sensor yang merupakan inti dari sensor PIR ini sehingga menyebabkan Pyroelectic sensor yang terdiri dari galium nitrida, caesium nitrat dan litium tantalate menghasilkan arus listrik.
- Amplifier -->Sebuah sirkuit amplifier yang ada menguatkan arus yang masuk pada material pyroelectric.
- Komparator-->Setelah dikuatkan oleh amplifier kemudian arus dibandingkan oleh komparator sehingga mengahasilkan output.
 |
Blok Diagram sensor PIR |
 |
| Jangkauan Sensor PIR |







6. Sensor Flame

 |
| Gambar : Grafik Respon Flame Sensor |


Operational Amplifier atau lebih dikenal dengan istilah Op-Amp adalah salah satu dari bentuk IC Linear yang berfungsi sebagai Penguat Sinyal listrik. Sebuah Op-Amp terdiri dari beberapa Transistor, Dioda, Resistor dan Kapasitor yang terinterkoneksi dan terintegrasi sehingga memungkinkannya untuk menghasilkan Gain (penguatan) yang tinggi pada rentang frekuensi yang luas. Dalam bahasa Indonesia, Op-Amp atau Operational Amplifier sering disebut juga dengan Penguat Operasional. Terminal yang terdapat pada Simbol Op-Amp (Operational Amplifier/penguat operasional) diantaranya adalah :
- Masukan non-pembalik (Non-Inverting) +
- Masukan pembalik (Inverting) –
- Keluaran Vout
- Catu daya positif +V
- Catu daya negatif -V


Respons karakteristik kurva I-O:


10. Relay

Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Pada dasarnya, Relay terdiri dari 4 komponen dasar yaitu :
- Electromagnet (Coil)
- Armature
- Switch Contact Point (Saklar)
- Spring
Berikut ini merupakan gambar dari bagian-bagian Relay :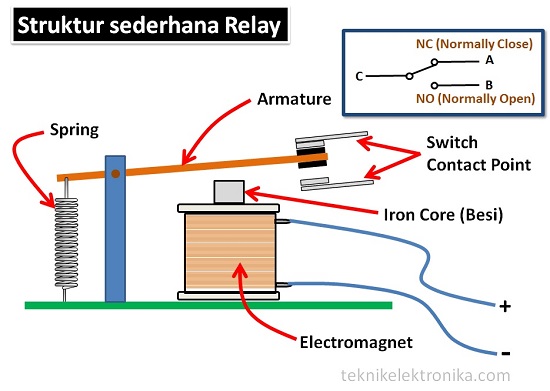
Kontak Poin (Contact Point) Relay terdiri dari 2 jenis yaitu :
- Normally Close (NC) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi CLOSE (tertutup)
- Normally Open (NO) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi OPEN (terbuka)
Berdasarkan gambar diatas, sebuah Besi (Iron Core) yang dililit oleh sebuah kumparan Coil yang berfungsi untuk mengendalikan Besi tersebut. Berdasarkan penggolongan jumlah Pole dan Throw-nya sebuah relay, maka relay dapat digolongkan menjadi :
- Single Pole Single Throw (SPST) : Relay golongan ini memiliki 4 Terminal, 2 Terminal untuk Saklar dan 2 Terminalnya lagi untuk Coil.
- Single Pole Double Throw (SPDT) : Relay golongan ini memiliki 5 Terminal, 3 Terminal untuk Saklar dan 2 Terminalnya lagi untuk Coil.
- Double Pole Single Throw (DPST) : Relay golongan ini memiliki 6 Terminal, diantaranya 4 Terminal yang terdiri dari 2 Pasang Terminal Saklar sedangkan 2 Terminal lainnya untuk Coil. Relay DPST dapat dijadikan 2 Saklar yang dikendalikan oleh 1 Coil.
- Double Pole Double Throw (DPDT) : Relay golongan ini memiliki Terminal sebanyak 8 Terminal, diantaranya 6 Terminal yang merupakan 2 pasang Relay SPDT yang dikendalikan oleh 1 (single) Coil. Sedangkan 2 Terminal lainnya untuk Coil.
Untuk lebih jelas mengenai Penggolongan Relay berdasarkan Jumlah Pole dan Throw, silakan lihat gambar dibawah ini :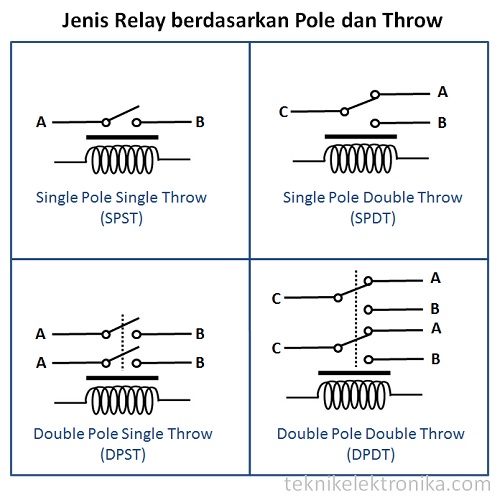
- Download library yang diperlukan pada bagian download dalam blog.
- Buka proteus yang sudah diinstal untuk membuat rangkaian.
- Tambahkan komponen seperti Arduino, sensor, dan perangkat lainnya lalu susun menjadi rangkaian.
- Buka Arduino IDE yang sudah diinstal.
- Di Arduino IDE, pergi ke menu "File" > "Preferences".Pastikan opsi
- "Show verbose during compile" dicentang untuk mendapatkan informasi detail saat kompilasi.
- Salin kode program Arduino pada blog kemudian tempelkan program tadi ke Arduino IDE.
- Kompilasikan kode dengan menekan tombol "Verify" di Arduino IDE.
- Cari dan salin path file HEX yang dihasilkan selama proses kompilasi.
- Kembali ke Proteus dan pilih Arduino yang telah Anda tambahkan di rangkaian.
- Buka opsi "Program File" dan tempelkan path HEX yang telah Anda salin dari Arduino IDE.
- Jalankan simulasi di Proteus.
- Arduino Uno
- PIR Sensor
- PH Sensor
- Infrared Sensor
- Ultrasonik Sensor
- Flame Sensor
- LED
- Jumper
- Motor Servo
- Buzzer

c. Rangkaian Simulasi dan Prinsip Kerja[Kembali]
.png)
d. Flowchart dan Listing Program[Kembali]
Flowchart :

f. Download File[Kembali]
- Download HTML klik disini
- Download File Rangkaian klik disini
- Download Gambar Rangkaian klik disini
- Download Video Simulasi klik disini
- Download Library Sensor Arduino klik disini
- Download Library Sensor Infrared klik disini
- Download Library Sensor Flame klik disini
- Download Library Sensor PIR klik disini
- Download Datasheet Sensor Arduino klik disini
- Download Datasheet Sensor Infrared klik disini
- Download Datasheet Sensor Flame klik disini
- Download Datasheet Sensor PIR klik disini
- Download Datasheet Resistor klik disini
- Download Datasheet Transistor NPN klik disini
- Download Datasheet OPAMP klik disini
- Download Datasheet LED klik disini
- Download Datasheet Motor DC klik disini
- Download Datasheet Buzzer klik disini
- Download Datasheet Relay klik disini
- Download Datasheet Baterai klik disini
- Download Datasheet Dioda klik disinii
- Download Datasheet Switch klik disini


{kind=link}
{kind=link}
{kind=link}
Tidak ada komentar:
Posting Komentar