Terarium, sebuah miniatur ekosistem yang dibuat dalam
wadah kaca, telah lama digunakan sebagai media pembelajaran dan penelitian
lingkungan hidup. Terarium dapat berisi berbagai jenis tanaman serta memiliki
fungsi sebagai miniatur ekosistem. Dalam beberapa tahun terakhir, terarium
telah menjadi sangat populer di kalangan masyarakat urban, terutama di Bandung,
yang memiliki berbagai jenis terarium yang dapat dibeli secara lengkap atau
dibuat sendiri dengan bahan-bahan yang tersedia. Namun, dalam beberapa tahun
terakhir, terarium telah mengalami beberapa masalah, seperti keterbatasan bahan
dan kesulitan dalam mencari media pembelajaran yang lebih mudah dan
menyenangkan. Oleh karena itu, perlu dibuat sistem kontrol yang lebih efektif
dan efisien untuk mengatur suhu dan kelembaban dalam terarium, sehingga dapat
memastikan keselamatan dan kesehatan tanaman serta hewan yang berada di
dalamnya. Sistem ini diharapkan dapat membantu masyarakat memahami peranan dan
fungsi ekosistem alam lebih baik dan juga dapat membantu dalam mengatur suhu
dan kelembaban dalam terarium dengan lebih efektif dan efisien.
- Memenuhi tugas project demo Modul 4 Praktikum
Mikroprosesor dan Mikrokontroller
- Mampu merangkai suatu alat berupa project demo
berdasarkan materi yang dipelajari pada modul-modul sebelumnya
- Mampu membuat prototype project demo dan simulasi
rangkaian project demo pada aplikasi proteus
- Mampu menjelaskan prinsip kerja
rangkaian project demo kontrol Monitoring LingkunganTerarium














a. PWM (Pulse Width
Modulation)
PWM atau kepanjangan Pulse Width
Modulation, dalam bahasa Indonesia biasa disebut Modulasi Lebar Pulsa. Pada
prinsipnya, PWM adalah salah satu teknik modulasi yang mengubah lebar pulsa
(pulse width) dengan nilai frekuensi dan amplitudo (tinggi pulsa) yang tetap.
PWM Signal ini digunakan menghasilkan sinyal analog dari perangkat Digital yang
salah satu contohnya adalah dari Mikrokontroler.
Pembagian Pin PWM:

Setiap Board Arduino memiliki pin PWM dan
nilai frekuensi yang berbeda-beda. Karena pada percobaan nanti kita akan
menggunakan board arduino nano, maka gunakan salah satu dari pin berikut 3, 5,
6, 9, 10, 11.
PWM pada arduino bekerja pada frekuensi
500Hz, artinya 500 siklus/ketukan dalam satu detik. Untuk setiap siklus, kita
bisa memberi nilai dari 0 hingga 255. Ketika kita memberikan angka 0, berarti
pada pin tersebut tidak akan pernah bernilai 5 volt (pin selalu bernilai 0
volt). Sedangkan jika kita memberikan nilai 255, maka sepanjang siklus akan
bernilai 5 volt (tidak pernah 0 volt). Jika kita memberikan nilai 127 (kita
anggap setengah
dari 0 hingga 255, atau 50% dari 255),
maka setengah siklus akan bernilai 5 volt, dan setengah siklus lagi akan
bernilai 0 volt. Sedangkan jika jika memberikan 25% dari 255 (1/4 * 255 atau
64), maka 1/4 siklus akan bernilai 5 volt, dan 3/4 sisanya akan bernilai 0
volt, dan ini akan terjadi 500 kali dalam 1 detik.
b. ADC (Analog to
Digital Converter)
ADC atau Analog to Digital Converter
merupakan salah satu perangkat elektronika yang digunakan sebagai penghubung
dalam pemrosesan sinyal analog oleh sistem digital. Fungsi utama dari fitur ini
adalah mengubah sinyal masukan yang masih dalam bentuk sinyal analog menjadi
sinyal digital dengan bentuk kode-kode digital. Ada 2 faktor yang perlu
diperhatikan pada proses kerja ADC yaitu kecepatan sampling dan resolusi.
Kecepatan sampling menyatakan seberapa sering perangkat mampu mengkonversi
sinyal analog ke dalam bentuk sinyal digital dalam selang waktu yang tertentu.
Biasa dinyatakan dalam sample per second (SPS). Sementara Resolusi menyatakan
tingkat ketelitian yang dimilliki. Pada Arduino, resolusi yang dimiliki adalah
10 bit atau rentang nilai digital antara 0 - 1023. Dan pada Arduino tegangan
referensi yang digunakan adalah 5 volt, hal ini berarti ADC pada Arduino mampu
menangani sinyal analog dengan tegangan 0 - 5 volt. Pada Arduino, menggunakan
pin analog input yang diawali dengan kode A( A0- A5 padaArduino Uno). Fungsi
untuk mengambil data sinyal input analog menggunakan analogRead(pin);

c. Mikrokontroler
Mikrokontroler adalah suatu chip berupa IC
(Integrated Circuit) yang dapat menerima sinyal input, mengolahnya dan
memberikan sinyal output sesuai dengan program yang diisikan ke dalamnya.
Sinyal input mikrokontroler berasal dari sensor yang merupakan informasi dari
lingkungan sedangkan sinyal output ditujukan kepada aktuator yang dapat
memberikan efek ke lingkungan. Jadi secara sederhana mikrokontroler dapat
diibaratkan sebagai otak dari suatu perangkat/produk yang mempu berinteraksi
dengan lingkungan sekitarnya. Mikrokontroler pada dasarnya adalah komputer
dalam satu chip, yang di dalamnya terdapat mikroprosesor, memori, jalur
Input/Output (I/O) dan perangkat pelengkap lainnya. Kecepatan pengolahan data
pada mikrokontroler lebih rendah jika dibandingkan dengan PC. Pada PC kecepatan
mikroprosesor yang digunakan saat ini telah mencapai orde GHz, sedangkan
kecepatan operasi mikrokontroler pada umumnya berkisar antara 1 – 16 MHz.
Begitu juga kapasitas RAM dan ROM pada PC yang bisa mencapai orde Gbyte, dibandingkan
dengan mikrokontroler yang hanya berkisar pada orde byte/Kbyte.
Meskipun kecepatan pengolahan data dan
kapasitas memori pada mikrokontroler jauh lebih kecil jika dibandingkan dengan
komputer personal, namun kemampuan mikrokontroler sudah cukup untuk dapat
digunakan pada banyak aplikasi terutama karena ukurannya yang kompak.
Mikrokontroler sering digunakan pada sistem yang tidak terlalu kompleks dan
tidak memerlukan kemampuan komputasi yang tinggi.

d. Komunikasi
Kegunaan dasar dari sistem komunikasi
adalah menjalankan pertukaran data antara dua pihak. Pada gambar dibawah ini
merupakan suatu model komunikasi yang sederhana yaitu komunikasi dua arah. Pada
mikrokontroler ada beberapa komunikasi yaitu:
• UART (Universal Asynchronous
Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan
antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit
terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port
serial perangkat peripheral.

Cara kerja komunikasi UART:
Data dikirimkan secara paralel dari data
bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit
kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial
dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit
tambahan, kemudia di transfer secara parallel ke data bus penerima
• Serial Peripheral Interface (SPI)
merupakan salah satu mode komunikasi serial synchrounous kecepatan tinggi yang
dimiliki oleh ATmega 328. Komunikasi SPI membutuhkan 3 jalur yaituMOSI, MISO,
dan SCK. Melalui komunikasi ini data dapat saling dikirimkan baik antara
mikrokontroller maupun antara mikrokontroller dengan peripheral lain di luar
mikrokontroler. MOSI: Master Output Slave Input Artinya jika dikonfigurasi
sebagai master maka pin MOSI sebagai output tetapi jika dikonfigurasi sebagai
slave maka pin MOSI sebagai input. MISO: Master Input Slave Output Artinya jika
dikonfigurasi sebagai master maka pin MISO sebagai input tetapi jika
dikonfigurasi sebagai slave maka pin MISO sebagai output. SCLK: Clock Jika
dikonfigurasi sebagai master maka pin CLK berlaku sebagai output tetapi jika
dikonfigurasi sebagai slave maka pin CLK
berlaku sebagai input. SS/CS: Slave Select/ Chip Select adalah jalur master
memilih slave mana yang akan dikirimkan data.

Sinyal clock dialirkan dari master ke slave yang
berfungsi untuk sinkronisasi. Master dapat memilih slave mana yang akan
dikirimkan data melalui slave select, kemudian data dikirimkan dari master ke
slave melalui MOSI. Jika master butuh respon data maka slave akan mentransfer
data ke master melalui MISO.
• Inter Integrated Circuit atau
sering disebut I2C adalah standar komunikasi serial dua arahmenggunakan dua
saluran yang didisain khusus untuk mengirim maupun menerima data. Sistem I2C
terdiri dari saluran SCL (Serial Clock) dan SDA (Serial Data) yang membawa informasi
data antara I2C dengan pengontrolnya.

Pada I2C, data ditransfer dalam bentuk message yang terdiri dari kondisi start, Address Frame, R/W bit, ACK/NACK bit, Data Frame 1, Data Frame 2, dan kondisi Stop. Kondisi start dimana saat pada SDA beralih dari logika high ke low sebelum SCL.Kondisi stop dimana saat pada SDA beralih dari logika low ke high sebelum SCL. R/W bit berfungsi untuk menentukan apakah master mengirim data ke slave atau meminta data dari slave. (logika 0 = mengirim data ke slave, logika 1 = meminta data dari slave) ACK/NACK bit berfungsi sebagai pemberi kabar jika data frame ataupun address frame telahditerima receiver.
e. Baterai

Baterai (Battery) adalah sebuah alat yang dapat merubah energi kimia yang
disimpannya menjadi energi Listrik yang dapat digunakan oleh suatu perangkat
Elektronik. Hampir semua perangkat elektronik yang portabel seperti Handphone,
Laptop, Senter, ataupun Remote Control menggunakan Baterai sebagai sumber
listriknya. Dengan adanya Baterai, kita tidak perlu menyambungkan kabel listrik
untuk dapat mengaktifkan perangkat elektronik kita sehingga dapat dengan mudah
dibawa kemana-mana. Dalam kehidupan kita sehari-hari, kita dapat menemui dua
jenis Baterai yaitu Baterai yang hanya dapat dipakai sekali saja (Single Use)
dan Baterai yang dapat di isi ulang (Rechargeable).
f. Resistor

Simbol :
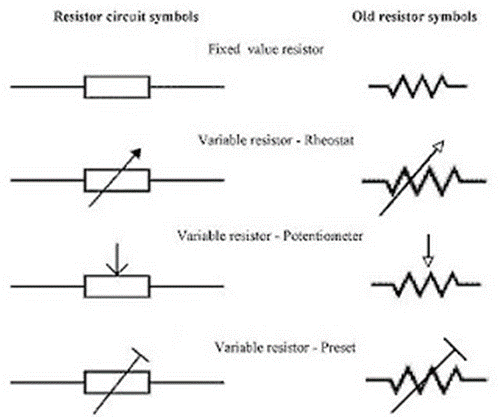
Resistor
adalah komponen Elektronika Pasif yang memiliki nilai resistansi atau hambatan
tertentu yang berfungsi untuk membatasi dan mengatur arus listrik dalam suatu
rangkaian Elektronika (V=I R).
Jenis
Resistor yang digunakan disini adalah Fixed Resistor, dimana merupakan
resistor dengan nilai tetap terdiri dari film tipis karbon yang
diendapkan subtrat isolator kemudian dipotong berbentuk spiral. Keuntungan
jenis fixed resistor ini dapat menghasilkan resistor dengan toleransi yang
lebih rendah.
Cara
menghitung nilai resistor:
Tabel warna


Contoh :
Gelang ke 1 : Coklat =
1
Gelang ke 2 : Hitam =
0
Gelang ke 3 :
Hijau = 5 nol dibelakang angka gelang ke-2; atau kalikan 105
Gelang ke 4 :
Perak = Toleransi 10%
Maka nilai resistor
tersebut adalah 10 * 105 = 1.000.000 Ohm atau 1 MOhm dengan toleransi 10%.




g Arduino Uno
Arduino
adalah kit elektronik atau papan rangkaian elektronik open source yang di
dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis
AVR dari perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini adalah
Arduino Uno yang menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino,
kita bisa menggunakan komunikasi serial agar Arduino dapat berhubungan dengan
komputer ataupun perangkat lain.
Adapun spesifikasi dari
Arduino Uno ini adalah sebagai berikut:

Gambar
Arduino
|
Microcontroller
ATmega328P |
|
Operating Voltage
5 V |
|
Input Voltage (recommended)
7 – 12 V |
|
Input Voltage (limit)
6 – 20
V |
|
Digital I/O Pins
14 (of which 6 provide PWM output) |
|
PWM Digital I/O Pins
6 |
|
Analog Input Pins
6 |
|
DC Current per I/O Pin
20 mA |
|
DC Current for 3.3V Pin
50 mA |
|
Flash Memory
32 KB of which 0.5 KB used by bootloader |
|
SRAM
2 KB |
|
EEPROM
1 KB |
|
Clock Speed
16 MHz |
Bagian-Bagian Arduino
UNO:
·
Power USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat
koneksi USB.
·
Power Jack
Supply atau sumber listrik untuk Arduino dengan
tipe Jack. Input DC 5 - 12 V.
·
Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak
jantung pada Arduino. Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau
16 MHz.
·
Reset
Digunakan untuk mengulang program Arduino dari awal
atau Reset.
·
Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital
Pin. Berfungsi untuk memberikan nilai logika ( 0 atau 1 ). Pin
berlabel " ~ " adalah pin-pin PWM ( Pulse Width
Modulation ) yang dapat digunakan untuk menghasilkan PWM.
·
Analog Pins
Papan Arduino UNO memiliki 6 pin
analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti
sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
·
LED Power Indicator
Lampu ini akan menyala dan menandakan
Papan Arduino mendapatkan supply listrik dengan baik.
h. Sensor LDR
Light Dependent Resistor atau disingkat dengan
LDR adalah jenis resistor yang nilai hambatan atau nilai resistansinya
tergantung pada intensitas cahaya yang diterimanya. Nilai Hambatan LDR akan
menurun pada saat cahaya terang dan nilai Hambatannya akan menjadi tinggi jika
dalam kondisi gelap. Dengan kata lain, fungsi LDR (Light Dependent Resistor)
adalah untuk menghantarkan arus listrik jika menerima sejumlah intensitas
cahaya (Kondisi Terang) dan menghambat arus listrik dalam kondisi gelap. Prinsip kerja LDR sangat sederhana tak jauh berbeda
dengan variable resistor pada umumnya. LDR dipasang pada berbagai macam
rangkaian elektronika dan dapat memutus dan menyambungkan aliran listrik
berdasarkan cahaya. Semakin banyak cahaya yang mengenai LDR maka nilai resistansinya
akan menurun, dan sebaliknya semakin sedikit cahaya yang mengenai LDR maka
nilai hambatannya akan semakin membesar. Naik turunnya nilai Hambatan akan
sebanding dengan jumlah cahaya yang diterimanya. Pada umumnya, Nilai Hambatan
LDR akan mencapai 200 Kilo Ohm (kΩ) pada kondisi gelap dan menurun 500 Ohm (Ω)
Kondisi cahaya terang
LDR
(Light Dependent Resistor) yang merupakan Komponen Elektronika peka cahaya ini
sering digunakan atau diaplikasikan dalam Rangkaian Elektronika sebagai sensor
pada Lampu Penerang Jalan, Lampu Kamar Tidur, Rangkaian Anti Maling, Shutter
Kamera, Alarm dan lain sebagainya.

Gambar
Sinyal dan Bentuk LDR
Bagian-Bagian LDR:

Gambar
Bagian-bagian LDR
Grafik Respon LDR:

Gambar
Grafik Respon LDR
Dari grafik
tersebut dapat disimpulkan bahwa besarnya hambatan atau resistansi dari
sensor ldr dipengaruhi oleh intensitas cahaya yang diberikan, dan dapat dilihat
bahwa semakin besar intensitas cahaya maka nilai resistansinya akan semakin
kecil dan begitu sebaliknya.
i. Sensor Touch

Touch Sensor atau Sensor Sentuh adalah sensor elektronik yang dapat mendeteksi sentuhan. Sensor Sentuh ini pada dasarnya beroperasi sebagai sakelar apabila disentuh, seperti sakelar pada lampu, layar sentuh ponsel dan lain sebagainya. Sensor Sentuh ini dikenal juga sebagai Sensor Taktil (Tactile Sensor). Seiring dengan perkembangan teknologi, sensor sentuh ini semakin banyak digunakan dan telah menggeser peranan sakelar mekanik pada perangkat-perangkat elektronik.
· Berdasarkan fungsinya, Sensor Sentuh dapat dibedakan menjadi dua jenis utama yaitu Sensor Kapasitif dan Sensor Resistif. Sensor Kapasitif atau Capacitive Sensor bekerja dengan mengukur kapasitansi sedangkan sensor Resistif bekerja dengan mengukur tekanan yang diberikan pada permukaannya.
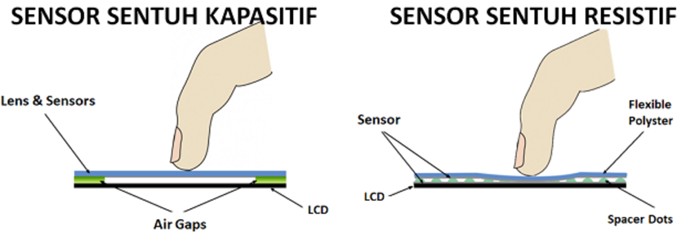 |
1) Sensor Kapasitif
Sensor sentuh Kapasitif merupakan sensor sentuh yang sangat populer pada saat ini, hal ini dikarenakan Sensor Kapasitif lebih kuat, tahan lama dan mudah digunakan serta harga yang relatif lebih murah dari sensor resistif. Ponsel-ponsel pintar saat ini telah banyak yang menggunakan teknologi ini karena juga menghasilkan respon yang lebih akurat.
Berbeda dengan Sensor Resistif yang menggunakan tekanan tertentu untuk merasakan perubahan pada permukaan layar, Sensor Kapasitif memanfaatkan sifat konduktif alami pada tubuh manusia untuk mendeteksi perubahan layar sentuhnya. Layar sentuh sensor kapasitif ini terbuat dari bahan konduktif (biasanya Indium Tin Oxide atau disingkat dengan ITO) yang dilapisi oleh kaca tipis dan hanya bisa disentuh oleh jari manusia atau stylus khusus ataupun sarung khusus yang memiliki sifat konduktif.
Pada saat jari menyentuh layar, akan terjadi perubahaan medan listrik pada layar sentuh tersebut dan kemudian di respon oleh processor untuk membaca pergerakan jari tangan tersebut. Jadi perlu diperhatikan bahwa sentuhan kita tidak akan di respon oleh layar sensor kapasitif ini apabila kita menggunakan bahan-bahan non-konduktif sebagai perantara jari tangan dan layar sentuh tersebut.
2) Sensor Resistif
Tidak seperti sensor sentuh kapasitif, sensor sentuh resistif ini tidak tergantung pada sifat listrik yang terjadi pada konduktivitas pelat logam. Sensor Resistif bekerja dengan mengukur tekanan yang diberikan pada permukaannya. Karena tidak perlu mengukur perbedaan kapasitansi, sensor sentuh resistif ini dapat beroperasi pada bahan non-konduktif seperti pena, stylus atau jari di dalam sarung tangan.
Sensor sentuh resistif terdiri dari dua lapisan konduktif yang dipisahkan oleh jarak atau celah yang sangat kecil. Dua lapisan konduktif (lapisan atas dan lapisan bawah) ini pada dasarnya terbuat dari sebuah film. Film-film umumnya dilapisi oleh Indium Tin Oxide yang merupakan konduktor listrik yang baik dan juga transparan (bening).
Cara kerjanya hampir sama dengan sebuah sakelar, pada saat film lapisan atas mendapatkan tekanan tertentu baik dengan jari maupun stylus, maka film lapisan atas akan bersentuhan dengan film lapisan bawah sehingga menimbulkan aliran listrik pada titik koordinat tertentu layar tersebut dan memberikan signal ke prosesor untuk melakukan proses selanjutnya.
Grafik respon:

j. Soil Masture

Soil Moisture
Sensor adalah suatu modul yang berfungsi untuk mendeteksi tingkat kelembaban
tanah dan juga dapat digunakan untuk menentukan apakah ada kandungan air di
tanah/ sekitar sensor. Cara penggunaan modul ini cukup mudah, yakni dengan
memasukkan sensor ke dalam tanah dan setting potensiometer untuk mengatur
sensitifitas dari sensor. Keluaran dari sensor akan bernilai 1 / 0 ketika
kelembaban tanah menjadi tinggi / rendah yang dapat di treshold dengan
potensiometer. Spesifikasi dari sensor ini adalah :
1. Comparator
menggunakan LM393
2. Hanya
menggunakan 2 plat kecil sebagai sensor
3. Supply
Tegangan 3.3-5 VDC
4. Digital
output D0 dapat secara langsung dikoneksikan dengan MCU dengan mudah
Sensor ini digunakan untuk mengukur kadar air didalam tanah, atau juga bisa untuk menedeteksi cuaca yang terjadi hari kemarin dan hari ini melalui media tanah, prinsip kerja sensor ini sangat simpel yaitu ada dua buah lempengan yang mana jika kedua buah lempengan terkena media penghantar maka elektron akan berpindah dari kutub + ke kutub - sehingga terjadilah arus yang akan menimbulkan tegangan. Pergerakan elektron dimanfaatkan untuk mendeteksi apakah ada air di tanah ataukah tidak, jika tanah basah berarti tanah tersebut mengandung media penghantar, namun jika tanah kering maka tidak mengandung media penghantar elektron, sehingga pada adc mikrokontroller akan terlihat perbedaannya.
k. LCD

Liquid
Crystal Display (LCD) adalah sebuah peralatan elektronik yang berfungsi untuk menampilkan output sebuah
sistem dengan cara membentuk suatu citra atau gambaran pada sebuah layar.
Secara garis besar komponen penyusun LCD terdiri dari kristal cair (liquid
crystal) yang diapit oleh 2 buah elektroda transparan dan 2 buah filter polarisasi
(polarizing filter).

Gambar
Penampang komponen penyusun LCD
Keterangan:
1.
Film dengan polarizing filter
vertical untuk memolarisasi cahaya yang masuk
2.
Glass substrate yang berisi
kolom-kolom elektroda Indium tin oxide (ITO)
3.
Twisted nematic liquid crystal
(kristal cair dengan susunan terpilin)
4.
Glass substrate yang berisi
baris-baris elektroda Indium tin oxide (ITO)
5.
Film dengan polarizing filter
horizontal untuk memolarisasi cahaya yang masuk
6.
Reflektor cahaya untuk memantulkan
cahaya yang masuk LCD kembali ke mata pengamat
Sebuah
citra dibentuk dengan mengombinasikan kondisi nyala dan mati dari pixel-pixel
yang menyusun layar sebuah LCD. Pada umumnya LCD yang dijual di pasaran sudah
memiliki integrated circuit tersendiri sehingga para pemakai dapat mengontrol
tampilan LCD dengan mudah dengan menggunakan mikrokontroler untuk mengirimkan
data melalui pin-pin input yang sudah tersedia.


Kaki-kaki yang terdapat pada LCD
l. Motor Servo

Gambar Konfigurasi Pin Motor Servo
Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor. motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan potensiometer dengan perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.
Prinsip kerja motor servo:
Motor servo dikendalikan dengan memberikan sinyal modulasi
lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa
sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros
motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan
memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5
ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah
jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka
poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum
jam). Lebih jelasnya perhatikan gambar dibawah ini.

Gambar Pulse Wide Modulation / PWM
lebar pulsa kendali telah diberikan, maka poros motor
servo akan bergerak atau berputar ke posisi yang telah diperintahkan, dan
berhenti pada posisi tersebut dan akan tetap bertahan pada posisi tersebut.
Jika ada kekuatan eksternal yang mencoba memutar atau mengubah posisi tersebut,
maka motor servo akan mencoba menahan atau melawan dengan besarnya kekuatan
torsi yang dimilikinya (rating torsi servo). Namun motor servo tidak akan
mempertahankan posisinya untuk selamanya, sinyal lebar pulsa kendali harus
diulang setiap 20 ms (mili detik) untuk menginstruksikan agar posisi poros
motor servo tetap bertahan pada posisinya.
- Sediakan alat dan bahan yang diperlukan untuk merangkai project demo
- Rangkaian alat dan bahan seperti gambar rangkaian di bawah
- Hubungkan sumber semua alat bahan ke salah satu sumber arduino dan ground semua bahan ke ground salah satu arduino
- Jalankan simulasi rangkaian
- Jika rangkaian berjalan sesuai dengan kondisi yang diinginkan, maka lanjutkan dengan membuat protype dari project demo
- Pahami datasheet masing masing komponen dengan mempertimbangkan tegangan yang digunakan, arus yang diperlukan, terutama spesifikasi masing masing komponen.
- Rangkai semua alat dan bahan sesuai dengan gambar yang telah dilampirkan.
- Pasang dan hubungkan semua alat dan bahan sehingga membentuk rangkaian jadi.

.jpeg)
c. Rangkaian Simulasi dan Prinsip Kerja[Kembali]
Rangkaian Simulasi Proteus :

- Rangkaian kontrol dan
monitoring terarium ini terdiri dari beberapa sensor dan aktuator yang
saling berinteraksi untuk menjaga kondisi optimal dalam terarium. Pertama,
sensor kelembaban tanah (soil moisture sensor) mengukur kadar kelembapan
tanah dengan mendeteksi perubahan konduktivitas listrik di antara dua
probe yang ditanam di tanah. Data kelembapan tanah ini kemudian dikirim ke
mikrocontroller (Arduino), yang akan mengaktifkan solenoid valve untuk
menyiram tanaman jika kelembapan tanah terlalu rendah
- Sensor gas MQ135 mengukur kualitas udara
dengan mendeteksi konsentrasi gas berbahaya seperti CO2 dan amonia. Data
dari sensor ini diolah oleh mikrocontroller, yang akan mengaktifkan sistem
ventilasi atau alarm jika konsentrasi gas mencapai tingkat yang berbahaya.
Sensor ultrasonik digunakan untuk mengukur jarak atau ketinggian air di
dalam terarium, dan data ini digunakan untuk mengontrol ultrasonic mist
maker yang menjaga kelembapan udara dengan menghasilkan kabut
- Sensor sentuh (touch
sensor) memungkinkan pengguna untuk mengendalikan komponen tertentu secara
manual, seperti menyalakan atau mematikan mist maker atau kipas. Sensor
suhu dan kelembapan (DHT11) mengukur suhu dan kelembapan udara di dalam
terarium, dan data ini digunakan oleh mikrocontroller untuk mengaktifkan
kipas DC jika suhu terlalu tinggi atau kelembapan terlalu rendah.
- Solenoid valve dan
solenoid door lock berfungsi untuk mengontrol aliran air untuk irigasi dan
akses pintu terarium. Solenoid valve membuka atau menutup aliran air
berdasarkan data kelembapan tanah, sedangkan solenoid door lock mengatur
akses pintu sesuai dengan kondisi yang ditentukan.
- LCD display menampilkan
data sensor secara real-time, seperti suhu, kelembapan, kelembapan tanah,
kualitas udara, dan status komponen lainnya, untuk pemantauan oleh
pengguna. Mikrocontroller (Arduino) berperan sebagai pusat kontrol yang
mengolah semua data dari sensor, mengambil keputusan berdasarkan data
tersebut, dan mengirimkan sinyal ke aktuator yang relevan untuk menjaga
kondisi optimal dalam terarium.
d. Flowchart dan Listing Program[Kembali]
a)
Master FC


b)
Slave FC



Listing Program :
a) Master
f. Download File[Kembali]
- Download HTML klik disini
- Download File Rangkaian klik disini
- Download Listing program klik disini
- Download Video Simulasi klik disini
- Download Library Sensor Arduino klik disini
- Download Library Sensor Touch klik disini
- Download Library Sensor Soil Masture klik disini
- Download Library Sensor Ldr klik disini
- Download Datasheet Sensor Arduino klik disini
- Download Datasheet Sensor Touch klik disini
- Download Datasheet Sensor Ldr klik disini
- Download Datasheet Sensor Soil Masture klik disini
- Download Datasheet DHT11 klik disini
- Download Datasheet Motor Servo klik disini
- Download Datasheet LCD klik disini
- Download Datasheet Relay klik disini
- Download Datasheet Dioda klik disinii


{kind=link}
Tidak ada komentar:
Posting Komentar